
Stepanova, K.; Rozlivek, J.; Puciow, F.; Krsek, P.; Pajdla, T. & Hoffmann, M. (2022), ‘Automatic self-contained calibration of an industrial dual-arm robot with cameras using self-contact, planar constraints, and self-observation’, Robotics and Computer-Integrated Manufacturing 73, 102250. [DOI][Elsevier – OPEN ACCESS pdf]
Dataset: Self-calibration dataset containing data and description for individual experiments for this paper (laser tracker, horizontal/vertical plane, self-touch), repeatability measurements. Download, readme.txt
Authors: Karla Stepanova1,2,*, Jakub Rozlivek 1,*, Frantisek Puciow 1, Pavel Krsek2, Tomas Pajdla2, Matěj Hoffmann1
*Both authors contributed equally to this work
1Dept. of Cybernetics, Faculty of Electrical Engineering, CTU in Prague, karla.stepanova@cvut.cz, matej.hoffmann@fel.cvut.cz
2Czech Institute of Informatics, Robotics, and Cybernetics, CTU in Prague, pajdla@cvut.cz
Abstract:
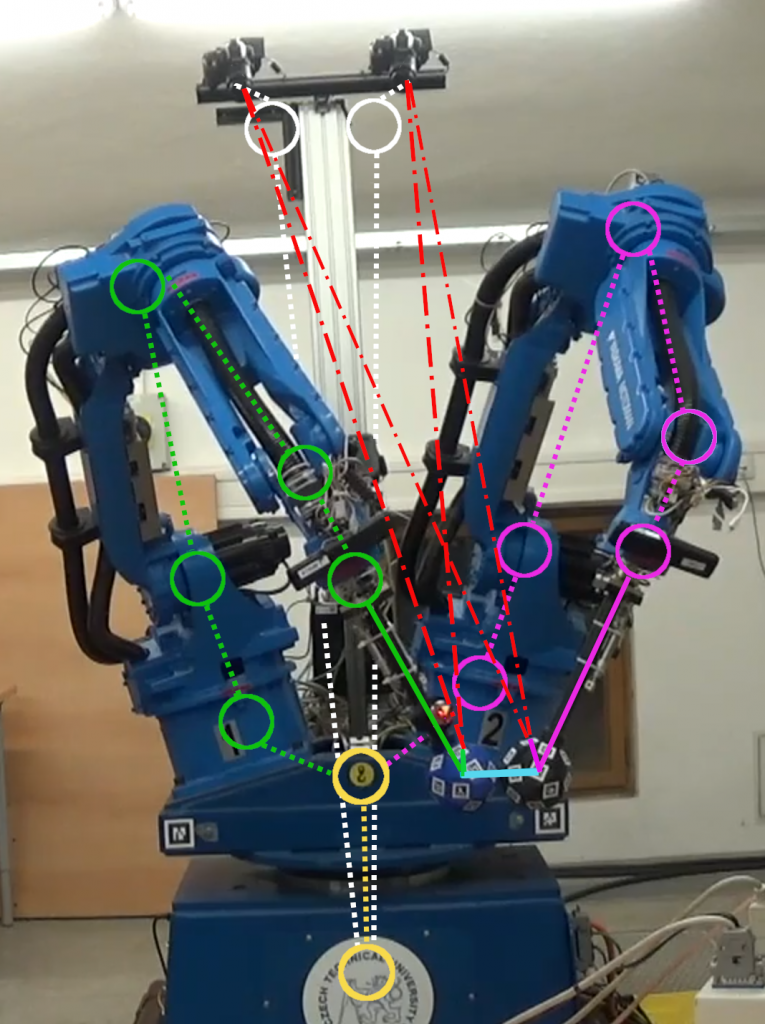
In this work, we study robot kinematic calibration by employing different combinations of calibration approaches: self-contact, planar constraints, and self-observation. To this end, we employ two industrial manipulators mounted on a common base with force/torque sensors at the wrist and additionally equip them with two cameras attached to the robot base and special end-effectors with fiducial markers. A comprehensive dataset has been collected for this purpose and made available to the community. We analyze estimation of the end effector parameters, joint offsets of the manipulators, calibration of the complete kinematic chain (DH parameters), and we compare our results with measurements provided by a laser tracker. The main findings are: (1) when applying the different calibration approaches in isolation, self-contact yielded best and most stable results; (2) combination of different approaches was always superior in terms of calibration errors as well as observability of parameters and improved the generalization of robot parameters found to other parts of workspace; (3) sequential calibration, i.e. calibrating first cameras and then robot kinematics, proved more effective than simultaneous calibration of all parameters. The dataset and its analysis provide quantitative and qualitative insights that are not specific to the robot used in this work and that are applicable to self-contained robot calibration in general.
Supplementary materials
We developed a simulation of our environment to support our results with additional experiments, especially with respect to the uncertainty of individual calibration approaches and measurement noise.
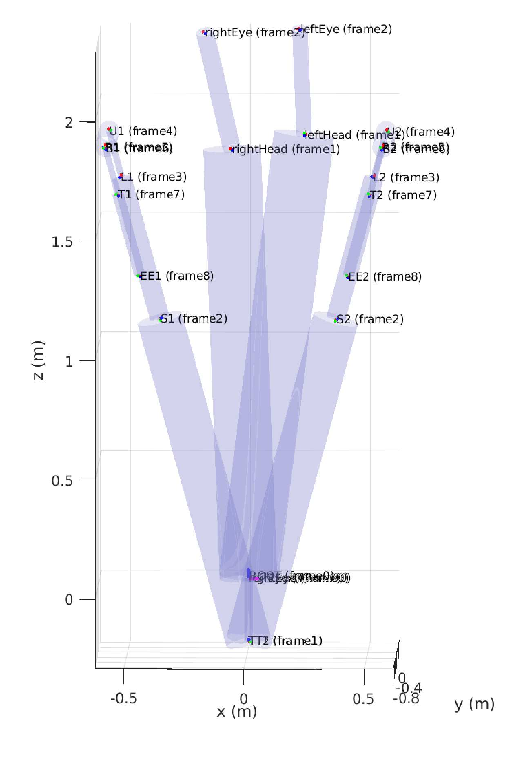
The simulation was built on top of the multisensorial calibration toolbox: https://github.com/ctu-vras/multirobot-calibration
The simulation enables perturbation of the following parameters:
- Marker attachment error (noises.mk_atta): the value determines the sigma of the normal distribution of the noise which is first multiplied by the marker orientation and then added to its position.
- Projection error (noises.mk_proj): the value determines the sigma of the normal distribution of the noise added to the projections to the camera
- Intrinsic camera parameters error (noises.camera.dist, tandist): the value determines the sigma of the normal distribution of the noise added to distortion coefs (intrinsic camera params)
- Focal length noise (noises.camera.u (v)): the value determines the sigma of the normal distribution of the noise
- Joint angles error (noises.ra_joints): the value determines the sigma of the normal distribution of the noise added to the values of the joint angles
- Touch distance error (noises.touch_dist): the value of the noise determines the sigma of the normal distribution of the noise added to the distance between the touching end effectors, the absolute value of the noise is taken to keep the distance positive
Uncertainty analysis
We evaluated an option how uncertainty of individual approaches might be taken into account and our corresponding model extended. The results on real and simulated data are in detail described in here.
http://karlastepanova.cz/publications/self-calibration-industry/motoman-uncertainty-analysis/
effect of noise on observability
In order to verify, how big might be the effect of measurement noise on observability and effective rank of the Jacobian, we run several experiments with a variable amount of measurement noise. The results of our analysis are presented in detail here.
http://karlastepanova.cz/publications/self-calibration-industry/effect-of-noise-on-observability/
comparison of approaches on an overlapping subset of workspace
Comparison of calibration approaches on a small subset of the workspace (overlapping for all the approaches). To explore, how would the calibration work, if all the approaches are trained on the same poses, we took a subset of our datasets, where were positions of the robot end-effector overlapping, and used it as the training set. The results are presented here. http://karlastepanova.cz/publications/self-calibration-industry/comparison-of-approaches-on-an-overlapping-subset-of-workspace/
dataset
Self-calibration dataset containing data and description for individual experiments for this paper (laser tracker, horizontal/vertical plane, self-touch), repeatability measurements. Download, readme.txt